FT232Hを使ってPCでGPIOやSPIを使えるようにする。
·
3min
Table of Contents
SPI接続のデバイスの制御をMCU、例えばCH32VシリーズとかESP32で行おうという場合、デバイスによっては結構SPIで送受信するデータが複雑で、これをデバイス上で開発、デバッグするのは骨が折れる。PCで開発しておいて、最後にハードウェア制御のところだけMCU用に差し替えるということで、もっと簡単に開発出来ないだろうか。
FT232Hは、USBでGPIOやSPI制御ができるチップだ。FT232Hで検索すれば、ボードになっているものが幾つか見つかる。AliExpressで発見したものを買ってみた。
準備
今回は、Lubuntu 26.04とRustを使用した。
まずUSBに接続してlsusbで確認してみる。
$ lsusb...
Bus 001 Device 027: ID 0403:6014 Future Technology Devices International, Ltd FT232H Single HS USB-UART/FIFO ICIDは0403:6014だ。このデバイス、デフォルトではカーネルにUSBシリアルと認識されて掴まれてしまうので、udevで細工する。/etc/udev/rules.d/99-ft232h.rulesを作成。
SUBSYSTEM=="usb", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6014", ACTION=="add", RUN+="/bin/sh -c 'echo 0 > /sys/$devpath/authorized_default'"
SUBSYSTEM=="usb", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6014", MODE="0666", GROUP="plugdev"udevを反映する。
$ sudo udevadm control --reload-rules$ sudo udevadm triggerカーネルに掴まれていないか確認する。
$ usb-devices | grep -E -A 4 "Vendor=0403 ProdID=6014"P: Vendor=0403 ProdID=6014 Rev=09.00
S: Manufacturer=FTDI
S: Product=Single RS232-HS
C: #Ifs= 1 Cfg#= 1 Atr=80 MxPwr=500mA
I: If#= 0 Alt= 0 #EPs= 2 Cls=ff(vend.) Sub=ff Prot=ff Driver=(none)Driver=(none)になればOK。FTDI用のライブラリをインストールしておく。
$ sudo apt install libftdi1-devRustのクレート作成
これで準備ができたのでRustでコードを書く。クレートを作ってライブラリを追加する。
$ cargo new ft232h$ cd ft232h$ cargo add ftdi-embedded-hal$ cargo add embedded-hal$ cargo add ftdi私が試した時点でのCargo.tmolはこんな感じ。
[dependencies]
embedded-hal = "1.0.0"
ftdi = "0.1.3"
ftdi-embedded-hal = { version = "0.24", features = ["ftdi"] }まずはLチカ(GPIO制御)
src/bin/blink.rsを作成する。
use ftdi_embedded_hal as hal;
use embedded_hal::digital::OutputPin;
use std::thread::sleep;
use std::time::Duration;
fn main() -> Result<(), Box<dyn std::error::Error>> {
// 1. デバイスのオープン
let device = ftdi::find_by_vid_pid(0x0403, 0x6014)
.interface(ftdi::Interface::A)
.open()?;
// 2. HALコンテキスト初期化
let ftdi_hal = hal::FtHal::init_default(device)?;
// 3. ピンの取得
let mut led = ftdi_hal.ad0()?;
println!("FT232H GPIO(Lチカ)を開始します");
loop {
led.set_high()?;
println!("LED ON");
sleep(Duration::from_millis(500));
led.set_low()?;
println!("LED OFF");
sleep(Duration::from_millis(500));
}
}実行。
$ cargo run --bin blinkSPI
bin/spi_cs.rsを作る。
use ftdi_embedded_hal as hal;
use embedded_hal::spi::SpiDevice;
use std::thread::sleep;
use std::time::Duration;
fn main() -> Result<(), Box<dyn std::error::Error>> {
// 1. デバイスのオープン
let device = ftdi::find_by_vid_pid(0x0403, 0x6014)
.interface(ftdi::Interface::A)
.open()?;
// 2. 2MHz で HAL 初期化
let ftdi_hal = hal::FtHal::init_freq(device, 2_000_000)?;
// 3. CS
let mut spi_device = ftdi_hal.spi_device(3)?;
println!("FT232H 自動CS制御テストを開始します(周波数: 2MHz)");
println!("ピン配置: AD0=SCK, AD1=MOSI, AD2=MISO, AD3=CS(自動制御)");
let mut counter: u8 = 0;
loop {
let tx_data = counter;
let mut buffer = [tx_data];
// 4. SpiDevice トレイトを介した通信
// 内部で自動的に CS Low -> SPI転送 -> CS High が完結します。
spi_device.transfer_in_place(&mut buffer)?;
println!(
"SPI通信結果 -> 送信: 0x{:02X} | 受信: 0x{:02X}",
tx_data, buffer[0]
);
counter = counter.wrapping_add(1);
sleep(Duration::from_secs(1));
}
}実行。
$ cargo run --bin spi_csコードに書かれている通り接続は以下のようになる。
| ピン番号 | 信号名 |
|---|---|
| D0 | SCK |
| D1 | MOSI |
| D2 | MISO |
| D3 | CS |
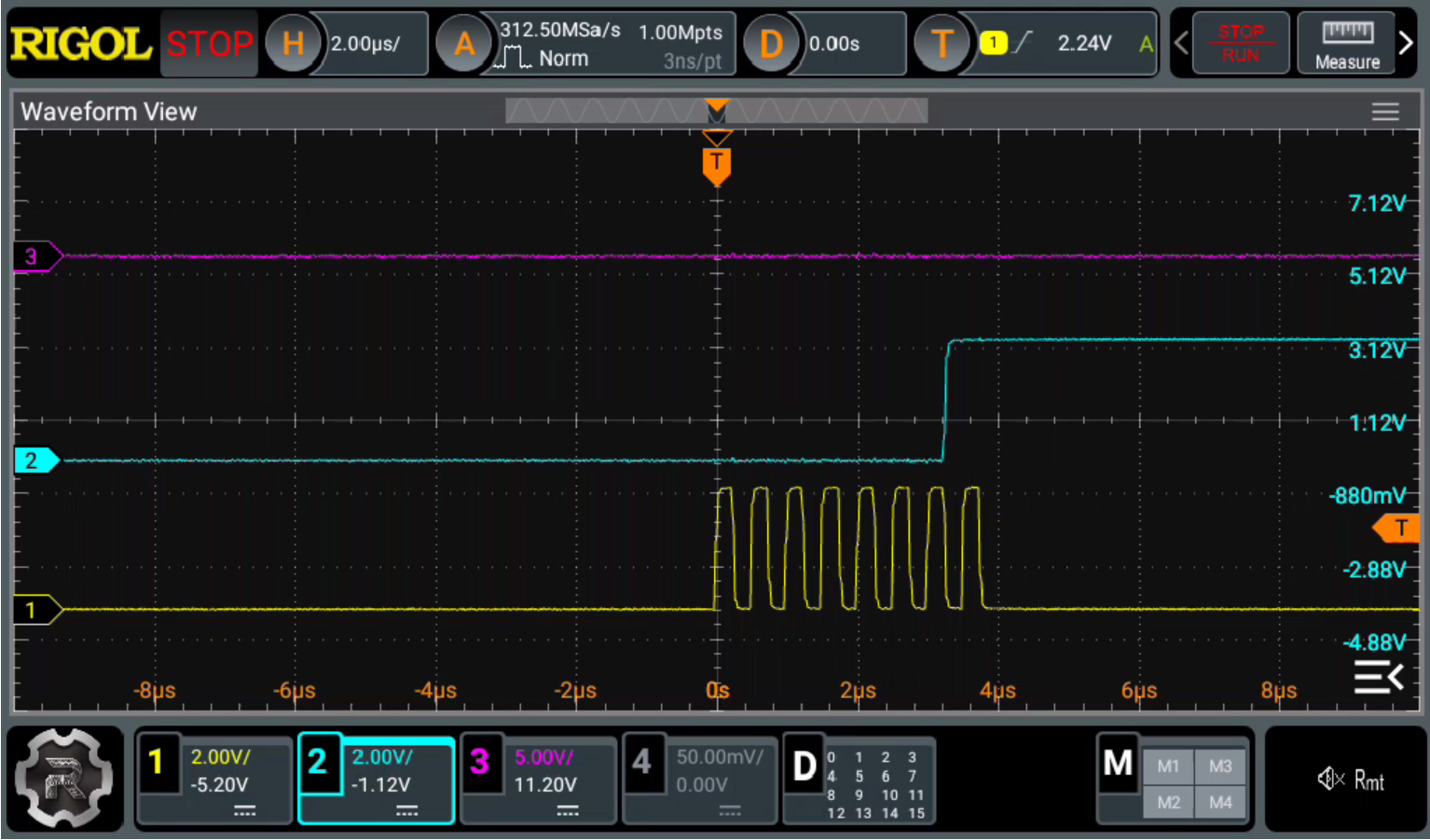
オシロで見てみる。ちゃんと2MHzで通信しているね。